




russtedrake PRO
Roboticist at MIT and TRI
MIT 6.4210/2: Robotic Manipulation
Fall 2023, Lecture 1
Follow live at https://slides.com/d/sE8qYNg/live
(or later at https://slides.com/russtedrake/fall23-lec01)
Website: http://manipulation.mit.edu
Communications Instructors from Comparative Media Studies/Writing
Recitations Fridays afternoons (starting Sept 15)
from the course website:
Matthew T. Mason. Toward Robotic Manipulation. Annual Review of Control, Robotics, and Autonomous Systems, 1:1-28, 2018.
Low-level feedback control from cameras / sensors
(continuous time/state/action)
Scene-understanding +
Task-level Planning
(discrete/symbolic)
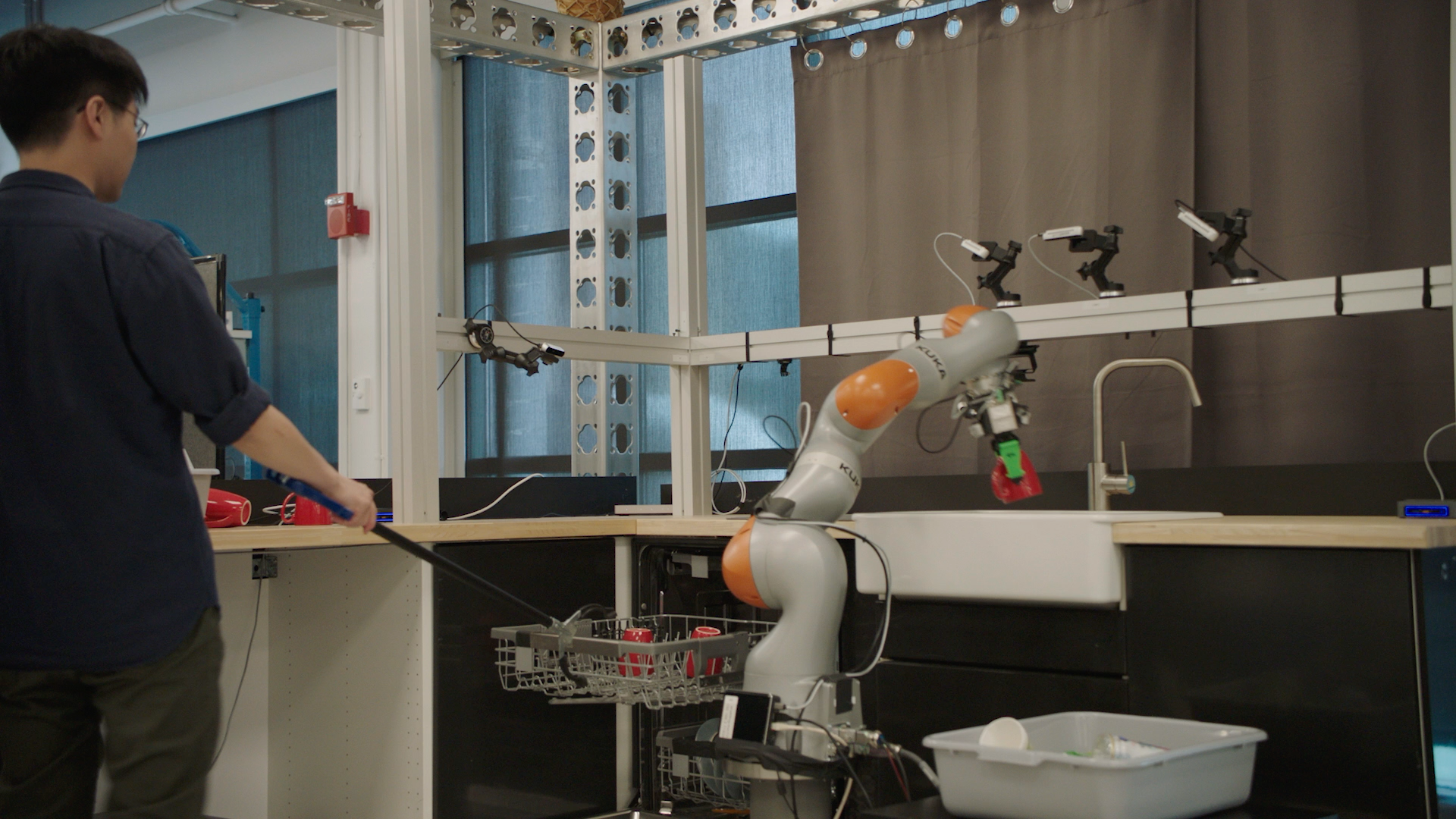
The world is even more "open" when the manipulation system goes mobile.
One goal for this year:
more mobile manipulation
(in lecture + projects)
How important is feedback in manipulation?
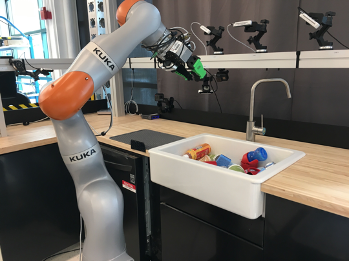
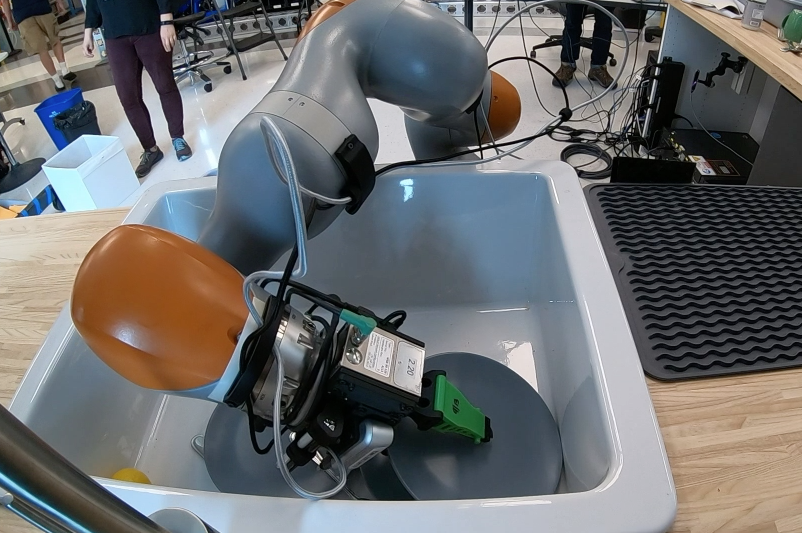
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
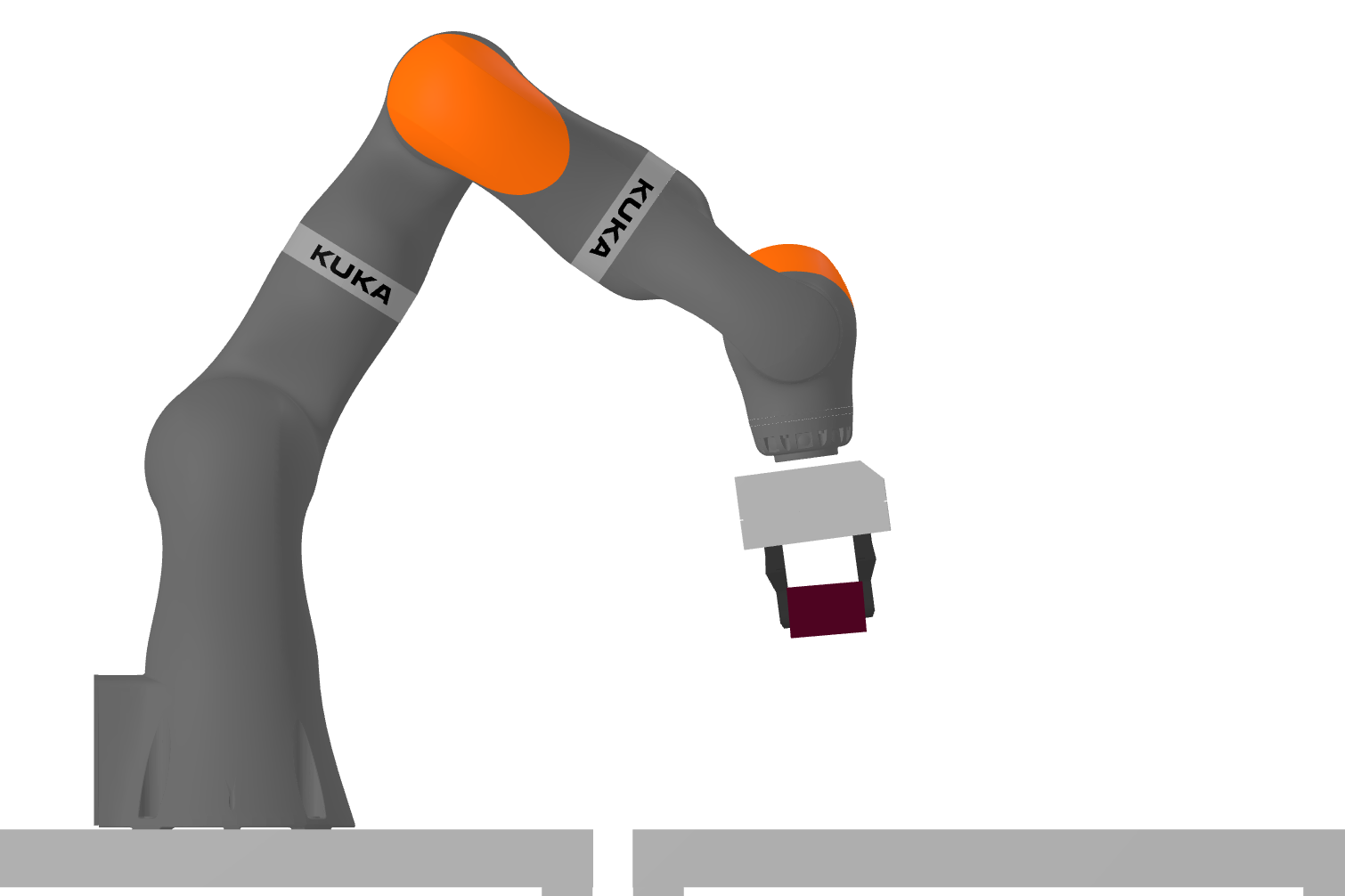
To be clear: we're not just controlling the arm
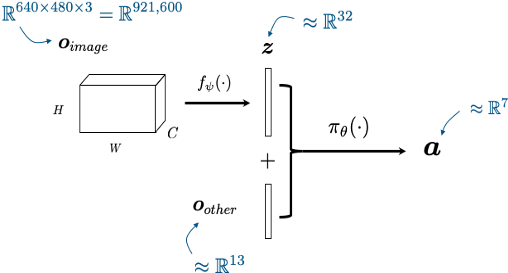
state of the robot x state of the environment
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
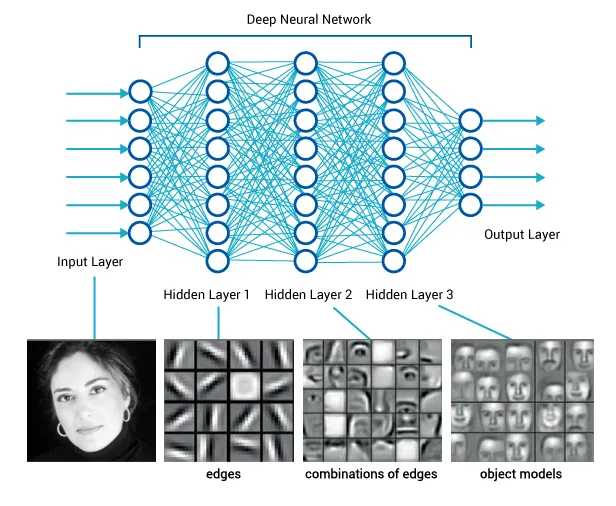
perception network
(often pre-trained)
policy network
other robot sensors
learned state representation
actions
Manipulation is much more than "pick and place"!
By russtedrake
MIT Robotic Manipulation Fall 2023 http://manipulation.mit.edu



