


















russtedrake PRO
Roboticist at MIT and TRI
Russ Tedrake
Mark Petersen
David von Wrangel
Bernhard Græsdal
Boyuan Chen
Shortest Paths in Graphs of Convex Sets.
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake.
Available at: https://arxiv.org/abs/2101.11565
Motion Planning around Obstacles with Convex Optimization.
Tobia Marcucci, Mark Petersen, David von Wrangel, Russ Tedrake.
Available at: https://arxiv.org/abs/2205.04422
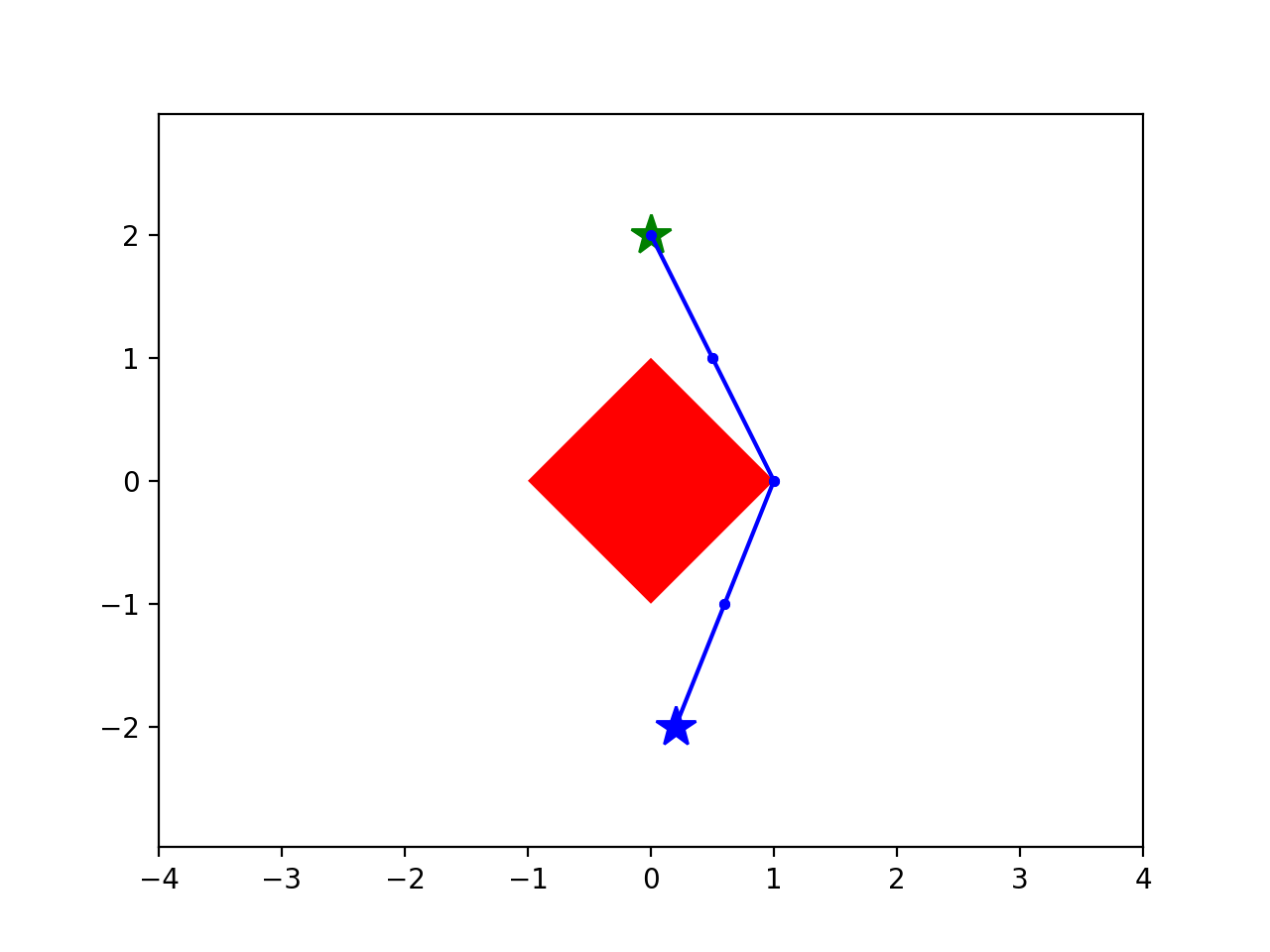
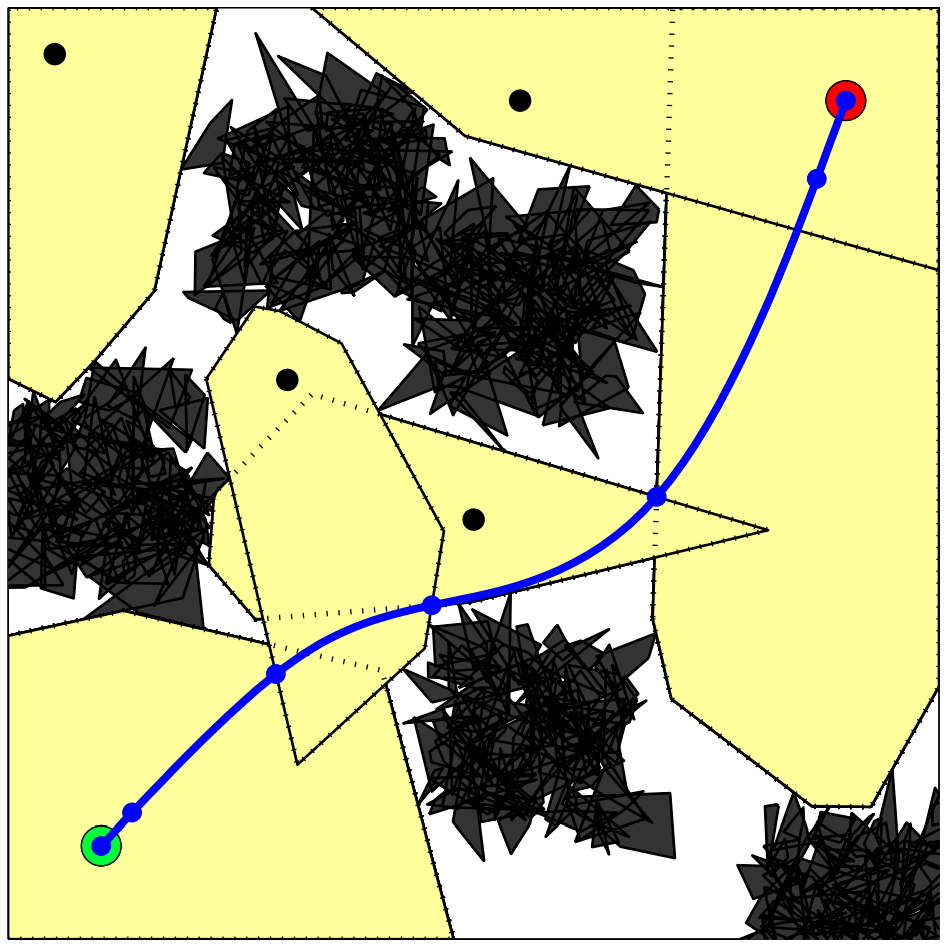
start
goal
Default playback at .25x
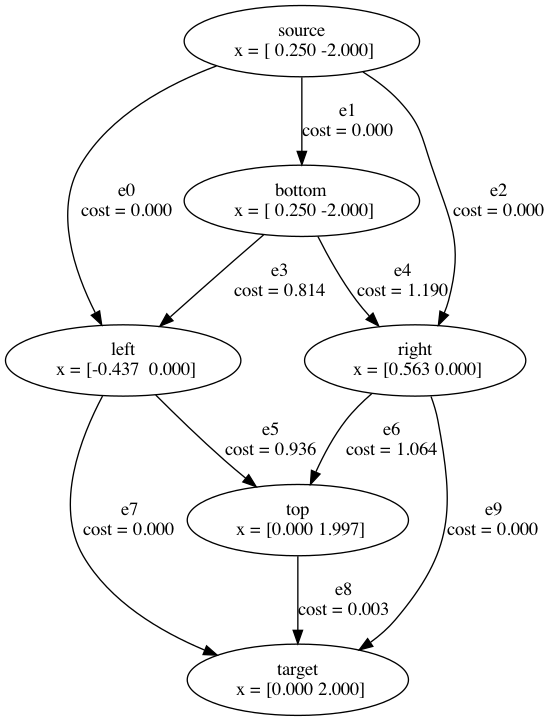
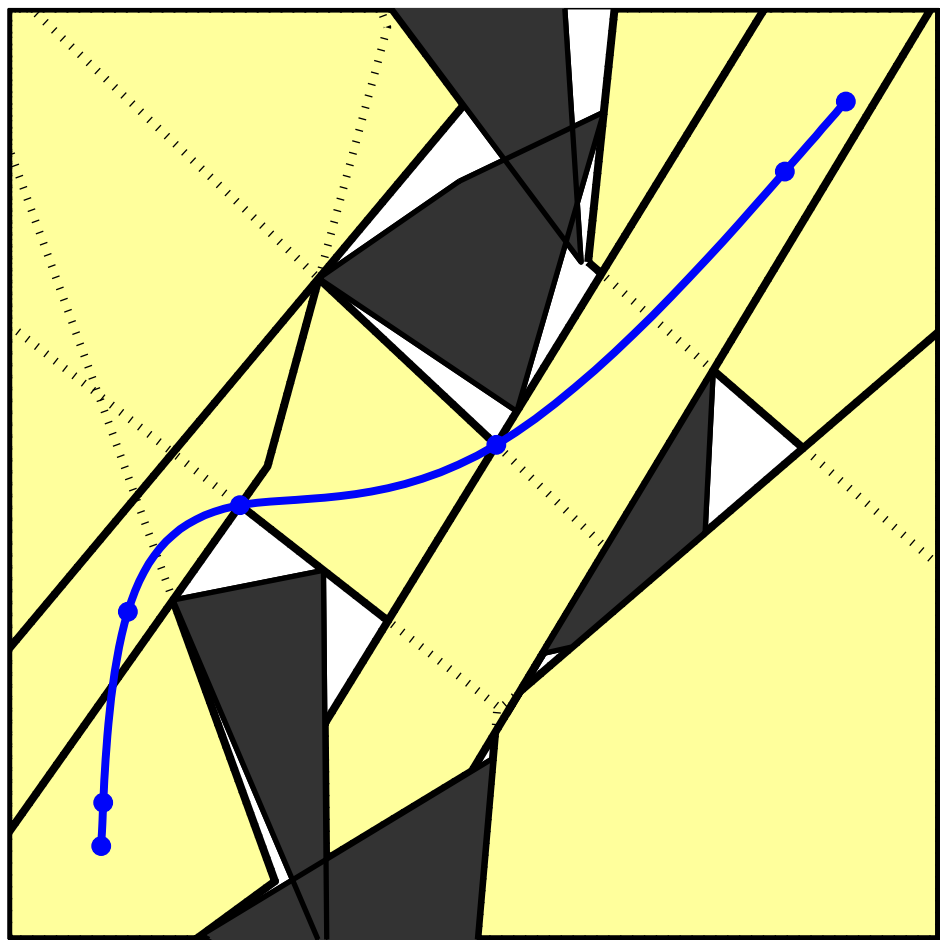
Graph of Convex Sets (GCS)
PRM
PRM w/ short-cutting
Preprocessor now makes easy optimizations fast!
Kinematic Trajectory Optimization
(for robot arms)
Note: The blue regions are not obstacles.
start
goal
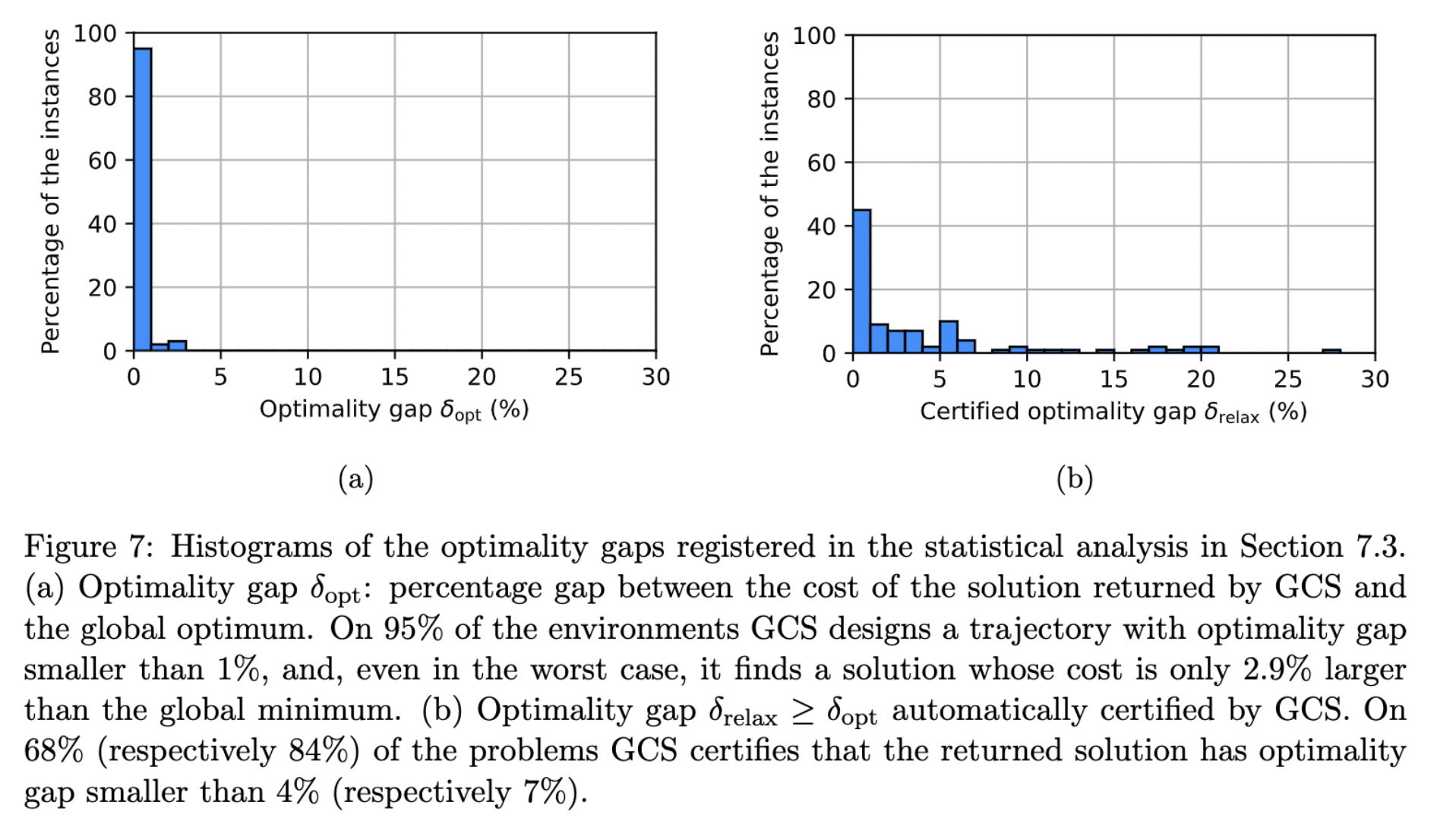
This is the convex relaxation
(it is tight!).
is the convex relaxation. (it's tight!)
Previous formulations were intractable; would have required \( 6.25 \times 10^6\) binaries.
Formulating motion planning with differential constraints as a Graph of Convex Sets (GCS)
+ time-rescaling
minimum distance
minimum time
Transcription to a mixed-integer convex program, but with a very tight convex relaxation.
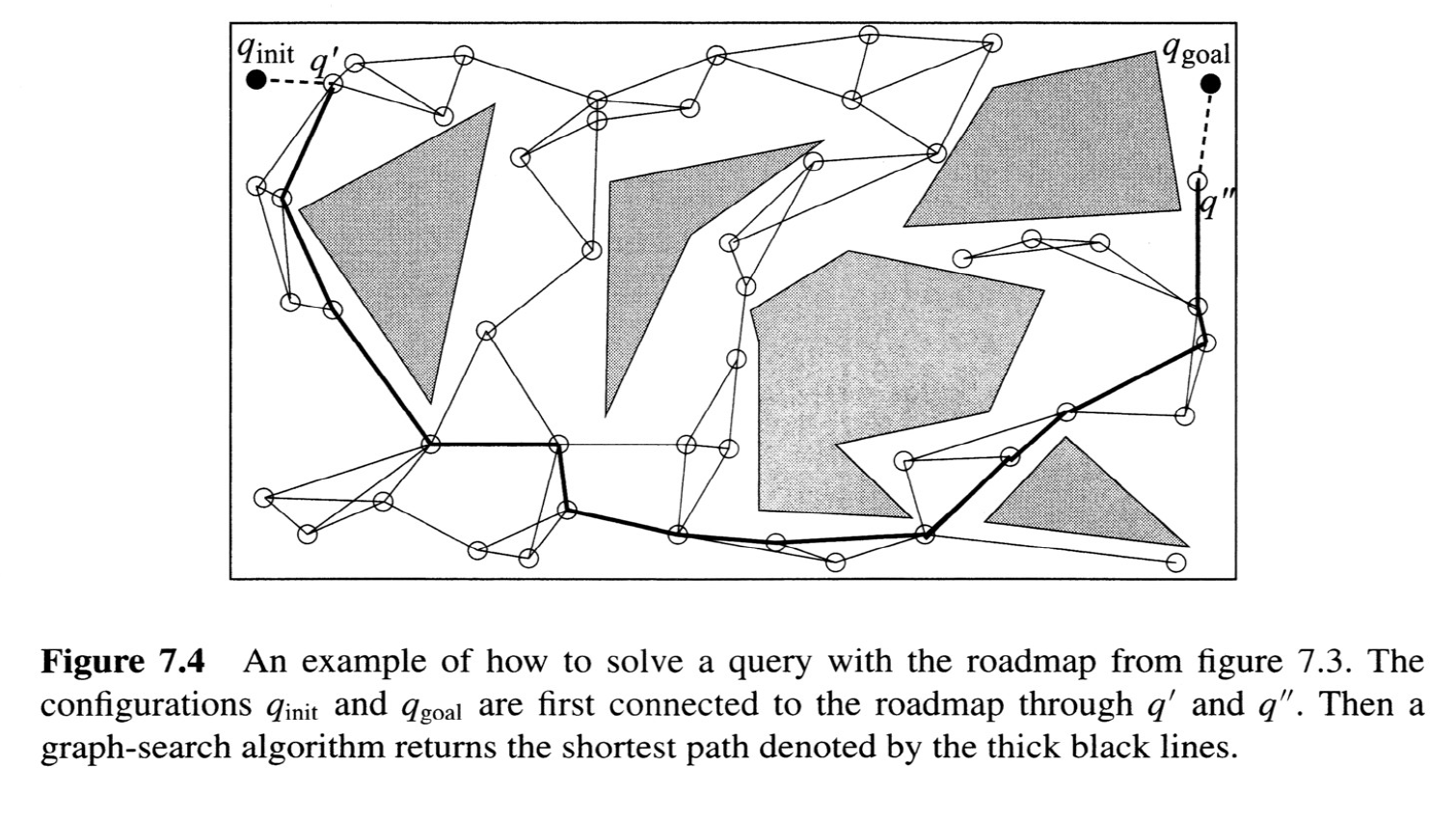
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
JBT has said "people like RRT as being cognitively relevant". The connection to graph search seems more natural to me?
LPK + TLP -- for TAMP, this motion planner says "yes" or "no" (compared to "yes" or "maybe, if you draw more samples")
By russtedrake



