Planning under uncertainty (and course wrap-up)

MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 22

Follow live at https://slides.com/d/bBIfQes/live
(or later at https://slides.com/russtedrake/fall22-lec22)

A sample annotated image from the COCO dataset
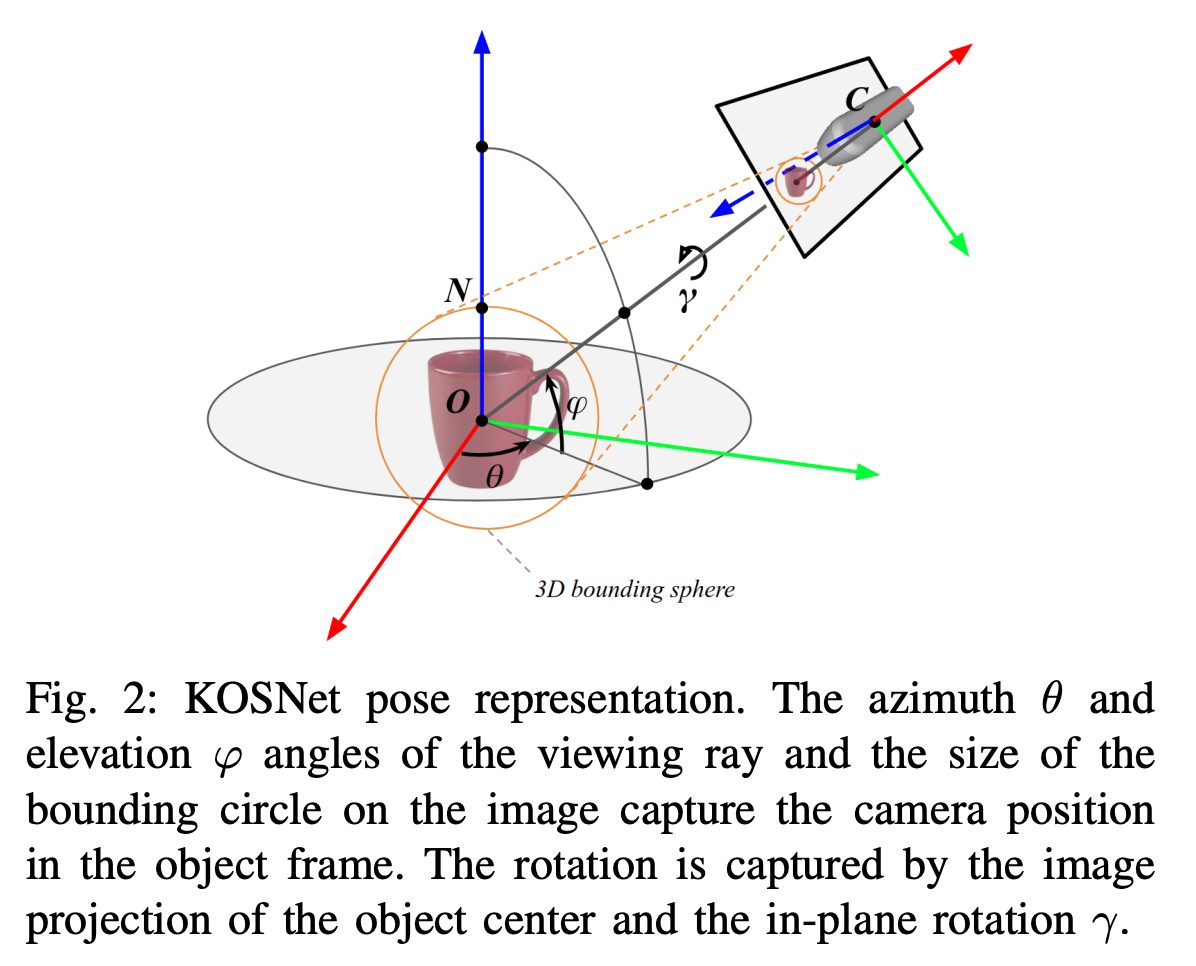

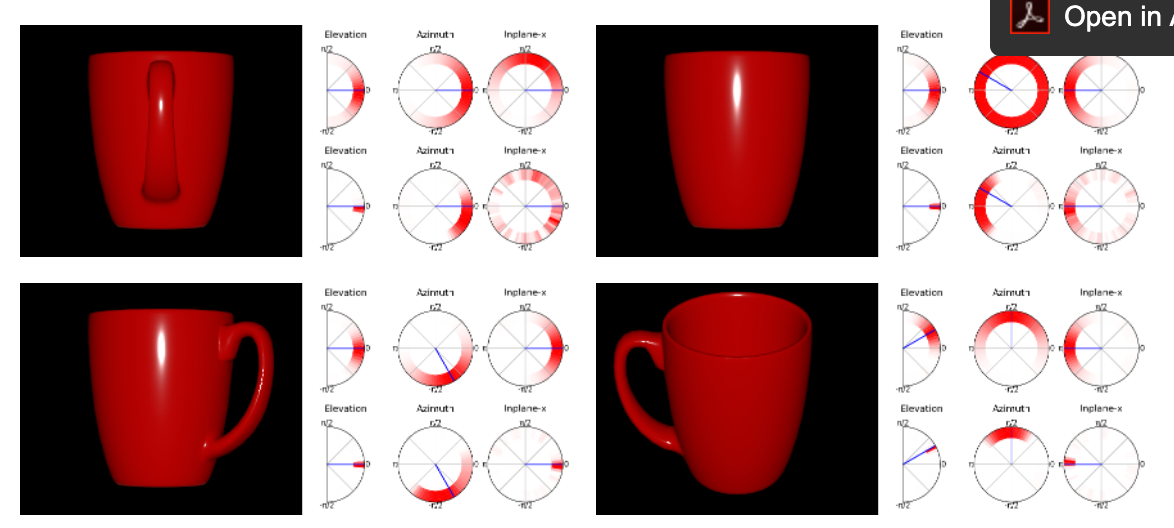

Typically don't predict keypoints directly; predict a "heatmap" instead
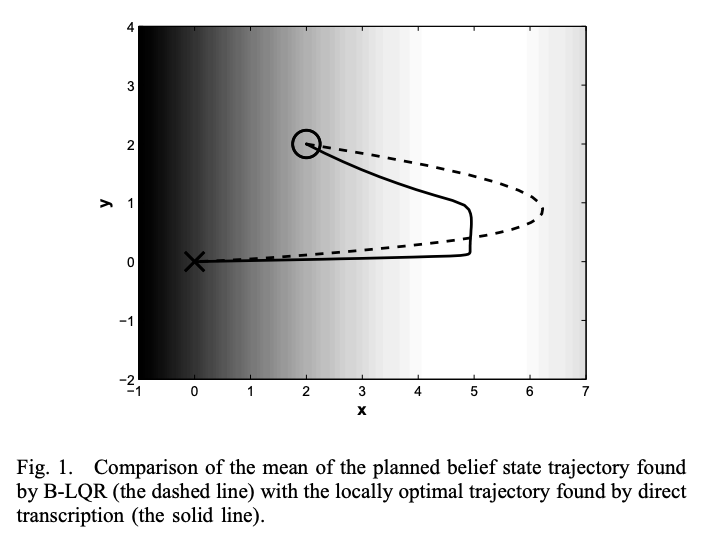
Rob Platt et al. Belief-space planning assuming maximum likelihood observations, RSS 2010
g(x, u, w) = x + (\frac{1}{2}(5 − x)^2 + c)w
state-dependent measurement noise
w \sim N(0, I)
b[N] = \begin{bmatrix} \mu_N \\ \Sigma_N \end{bmatrix}
\begin{aligned}\min & \qquad \Sigma_N \\
\text{subj to} & \qquad \mu_N = 0 \end{aligned}
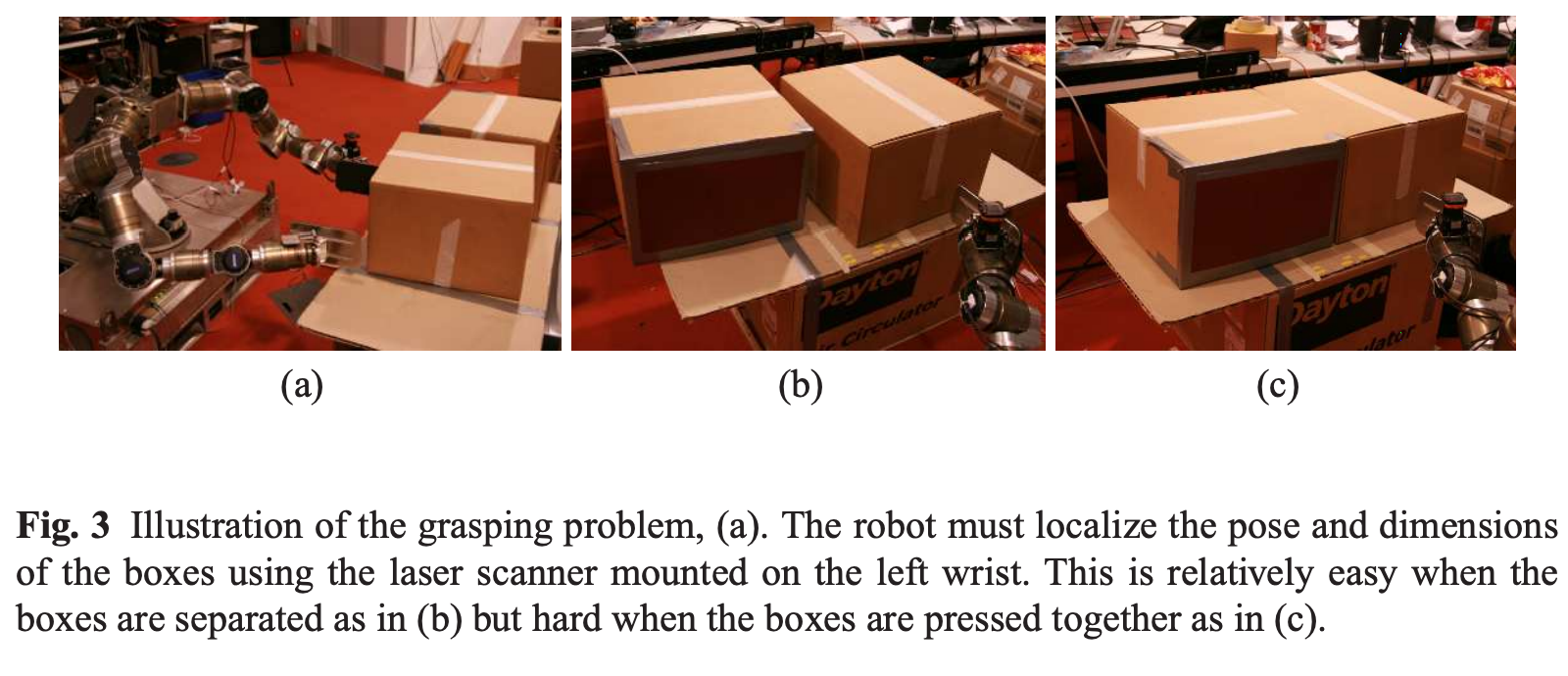
Rob Platt et al. Efficient planning in non-Gaussian belief spaces and its application to robot grasping, ISRR, 2011.
Rob Platt et al. Efficient planning in non-Gaussian belief spaces and its application to robot grasping, ISRR, 2011.