


russtedrake PRO
Roboticist at MIT and TRI
Part 2:
MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 9
Follow live at https://slides.com/d/zueY9Ls/live
(or later at https://slides.com/russtedrake/fall22-lec09)
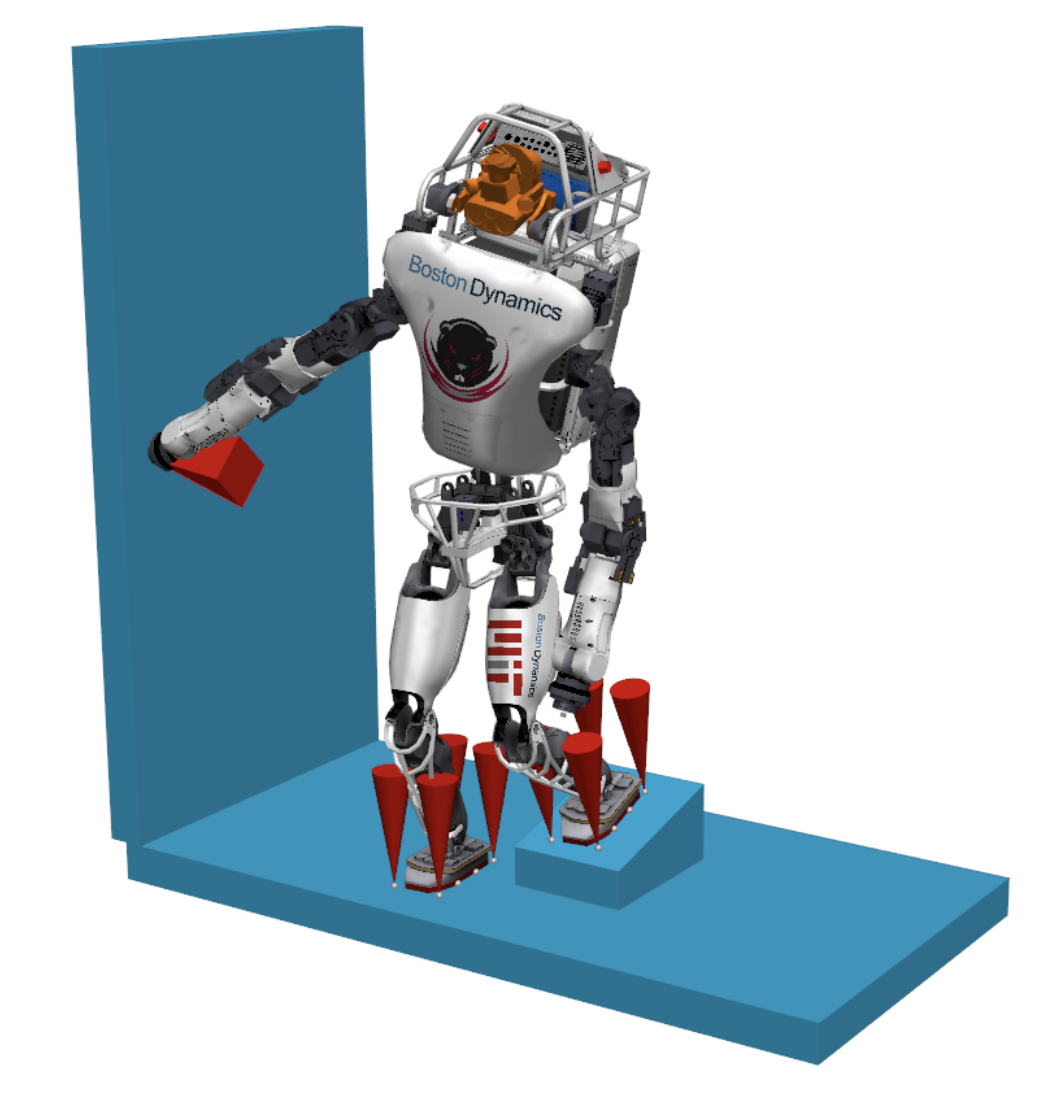
(unpublished) work by Lucas Manuelli ~2017. No deep learning -- this is geometry only.
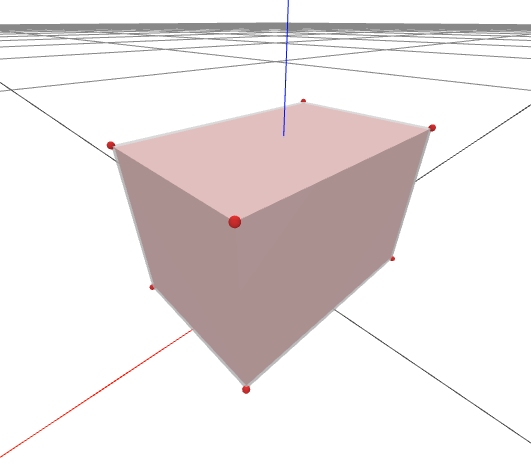
http://www.open3d.org/docs/latest/tutorial/Advanced/voxelization.html
By russtedrake
MIT Robotic Manipulation Fall 2021 http://manipulation.csail.mit.edu



