Geometric perception
(part 1)

MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 5

Follow live at https://slides.com/d/3C55OuI/live
(or later at https://slides.com/russtedrake/fall22-lec05)
Basic Pick and Place
So far, we have assumed a "perception oracle" that could tell us \({}^WX^O\).
Stop using "cheat ports"
Use the cameras instead!
Pick and Place with Perception
Geometry sensors -- lidar / time of flight


Velodyne spinning lidar
Hokoyu scanning lidar
Luminar
(500m range)


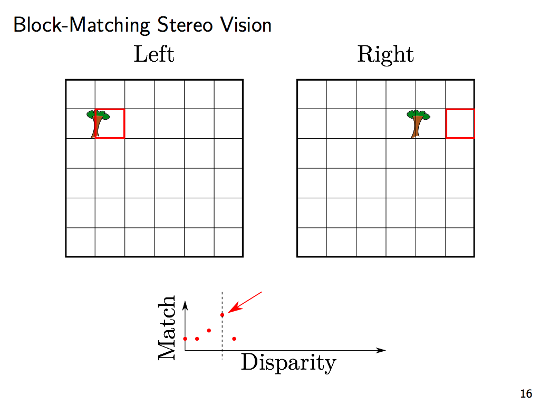
Geometry sensors -- stereo


Carnegie multisense stereo
Point Grey Bumblebee
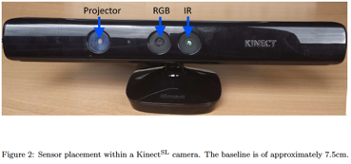
Geometry sensors -- structured light
Microsoft Kinect

Asus Xtion
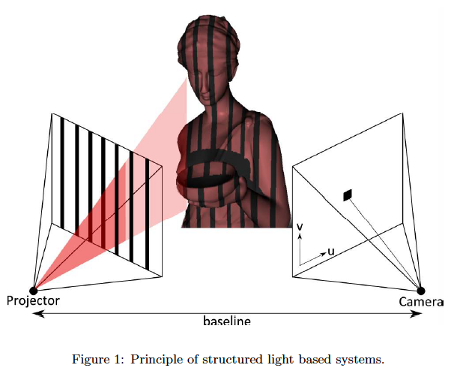
https://arxiv.org/abs/1505.05459
Geometry sensors -- time of flight

Microsoft Kinect v2
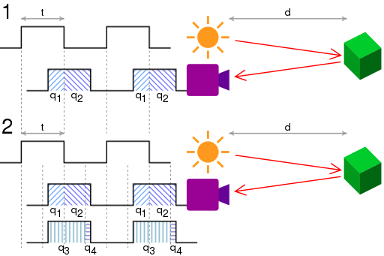
Samsung Galaxy DepthVision
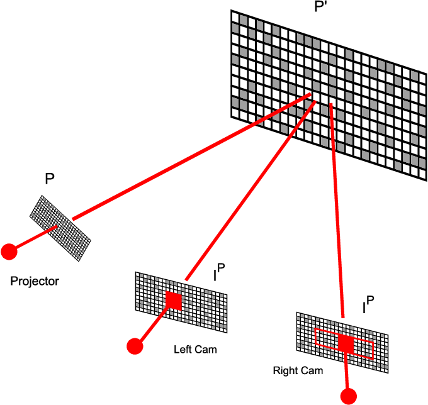
Geometry sensors -- projected texture stereo
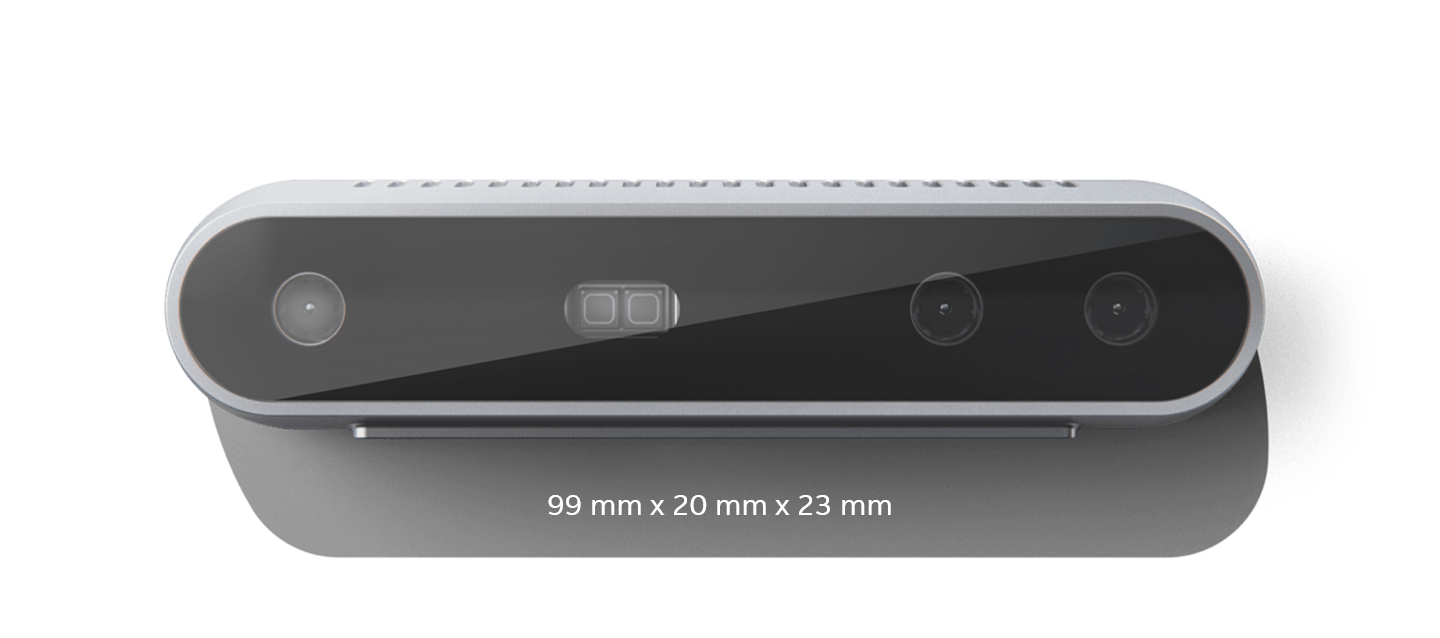
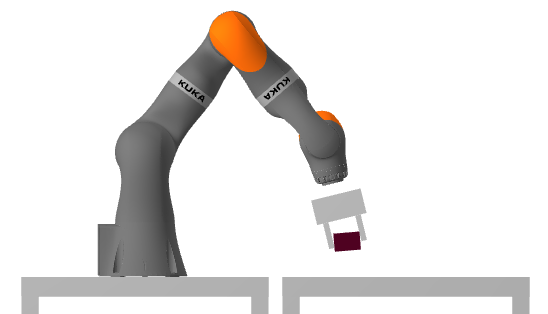
Intel Realsense D415
Our pick for the "Manipulation Station"
Major advantage over e.g. ToF: multiple cameras don't interfere with each other.
(also iPhone TrueDepth)


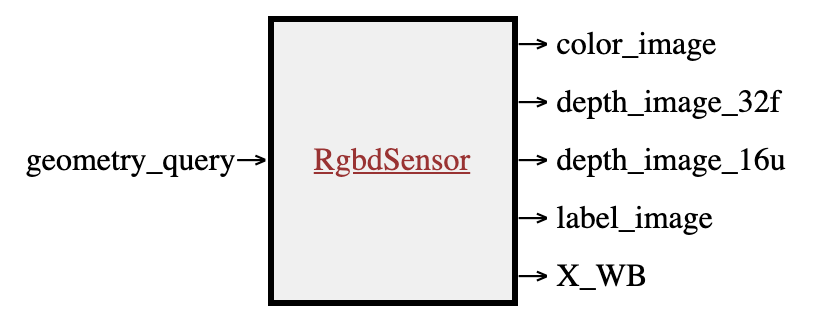
from the docs: "Each pixel in the output image from depth_image is a 16bit unsigned short in millimeters."

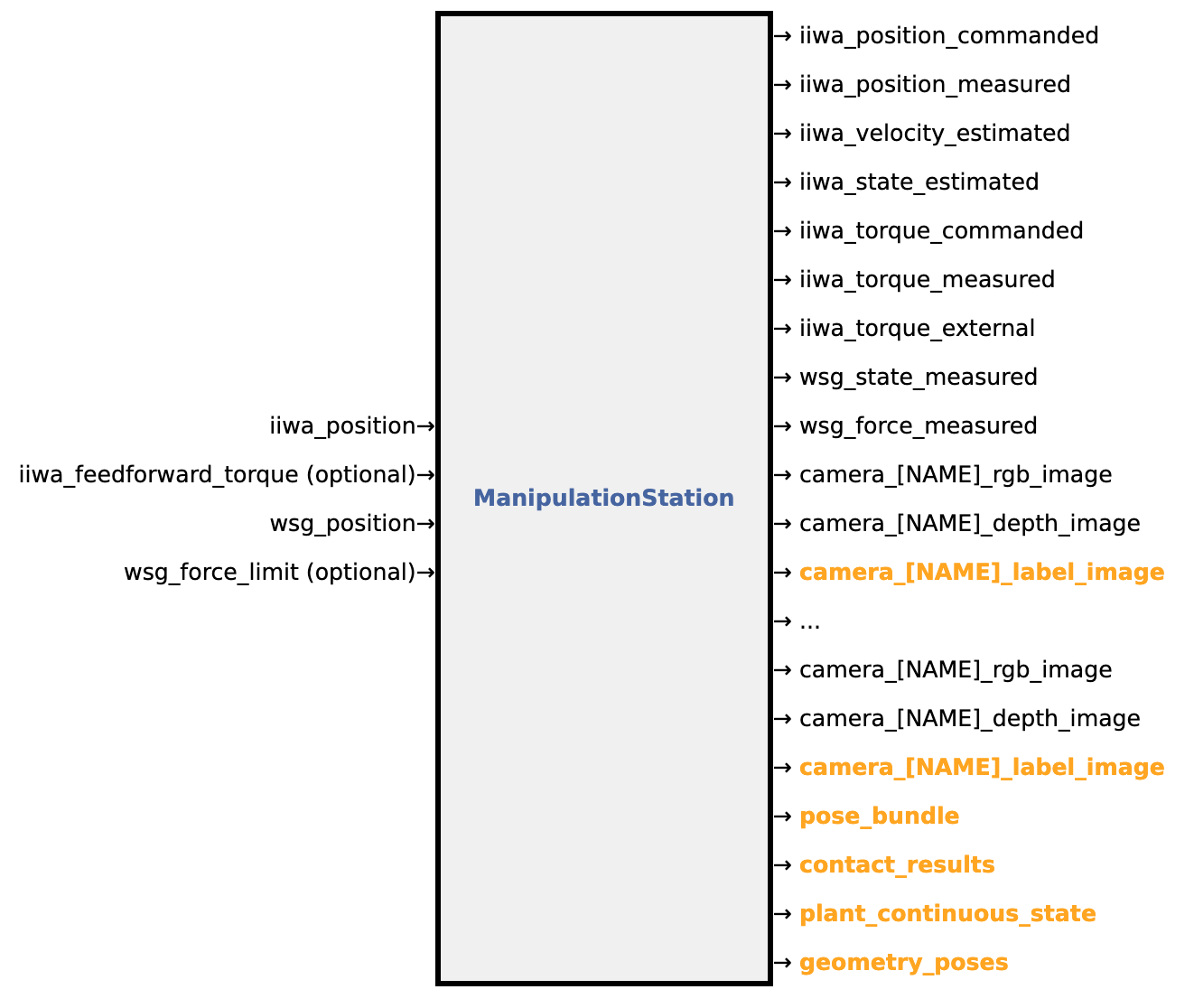
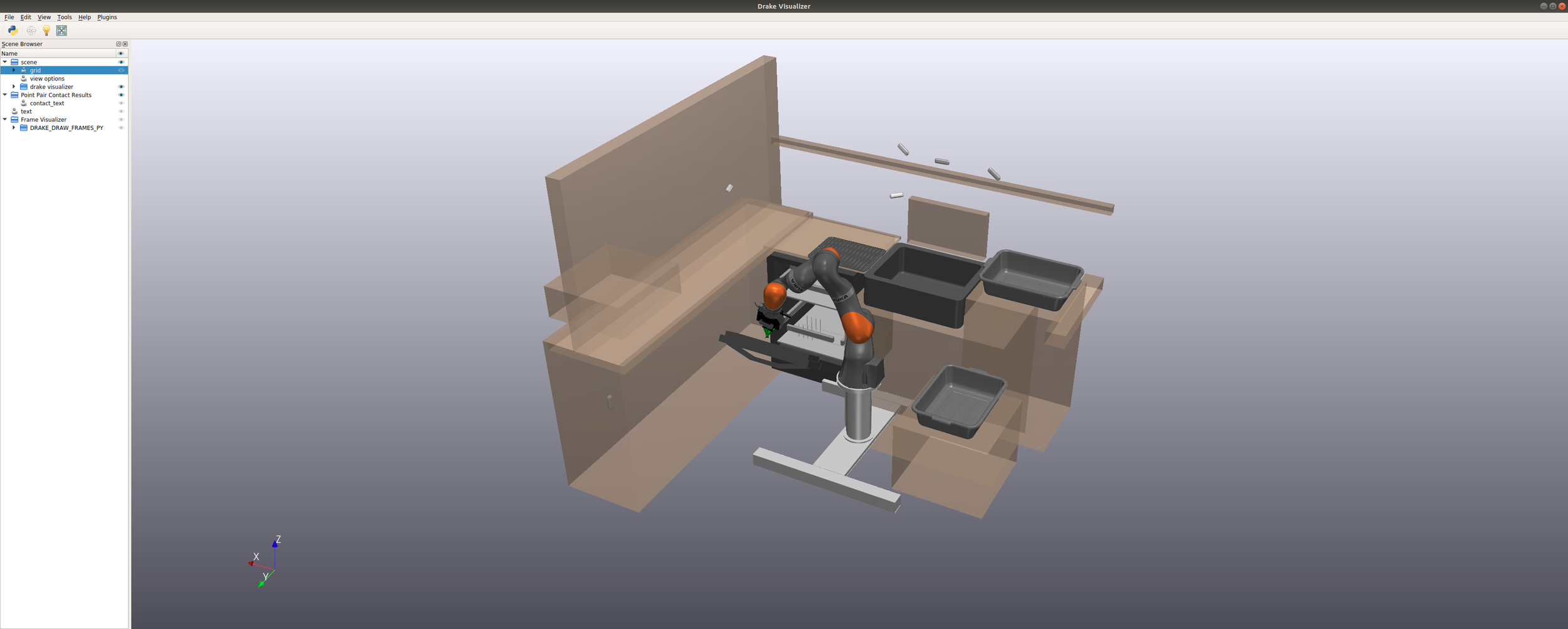
MultibodyPlant
SceneGraph
RgbdSensor
DepthImageToPointCloud
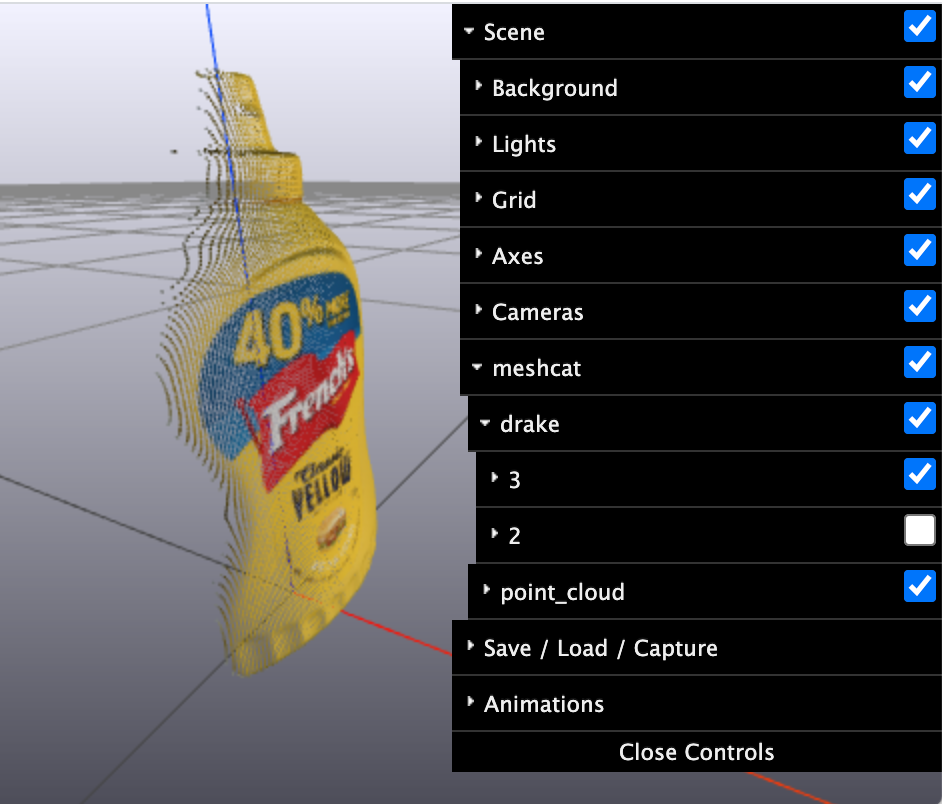
MeshcatVisualizer
MeshcatPointCloudVisualizer
two on wrist
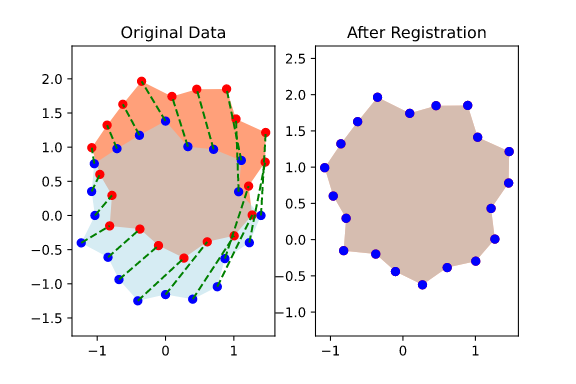
Real point clouds are also messy
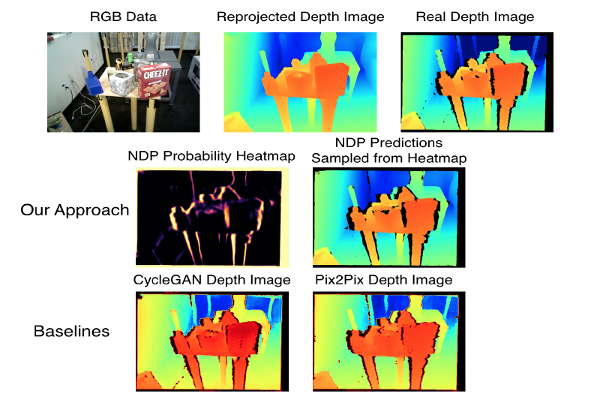
figure from Chris Sweeney et al. ICRA 2019.
to the board...